
我们已经知道,向量可以在一个向量空间中进行加法和数乘运算。一个自然的问题是:给定一组向量,我们是否能用其中的一部分来表示出另一部分?换句话说,这组向量中是否存在“冗余”的信息?线性无关性就是用来精确描述这种“冗余性”的语言。
1. 线性组合 (Linear Combination)#
准确的数学定义 (Definition 2.11)
给定向量空间 \(V\) 中的一组向量 \(\{\boldsymbol{x}_1, \boldsymbol{x}_2, \dots, \boldsymbol{x}_k\}\) 和一组标量 \(\{\lambda_1, \lambda_2, \dots, \lambda_k\} \subset \mathbb{R}\),形如:
$$ \boldsymbol{v} = \lambda_1\boldsymbol{x}_1 + \lambda_2\boldsymbol{x}_2 + \cdots + \lambda_k\boldsymbol{x}k = \sum{i=1}^{k} \lambda_i\boldsymbol{x}_i $$的向量 \(\boldsymbol{v}\) 被称为向量组 \(\{\boldsymbol{x}_1, \dots, \boldsymbol{x}_k\}\) 的一个线性组合。
2. 线性无关与线性相关的定义#
我们特别关心一种特殊的线性组合——结果为零向量 \(\boldsymbol{0}\) 的线性组合。
准确的数学定义 (Definition 2.12)
对于向量空间 \(V\) 中的一组向量 \(\{\boldsymbol{x}_1, \boldsymbol{x}_2, \dots, \boldsymbol{x}_k\}\):
- 如果方程 \(\lambda_1\boldsymbol{x}_1 + \lambda_2\boldsymbol{x}_2 + \cdots + \lambda_k\boldsymbol{x}_k = \boldsymbol{0}\) 只存在唯一解 \(\lambda_1 = \lambda_2 = \cdots = \lambda_k = 0\),那么这组向量被称为线性无关 (linearly independent)。这个唯一的解被称为平凡解 (trivial solution)。
- 如果该方程除了平凡解之外还存在其他解(即至少有一个 \(\lambda_i \neq 0\)),那么这组向量被称为线性相关 (linearly dependent)。
直观解释
- 线性无关:
- “没有冗余”: 向量组中的任何一个向量都不能被其他向量的线性组合表示出来。
- “提供了新方向”: 每个向量都贡献了一个其他向量无法企及的“维度”或“方向”。
- 几何上: 在三维空间中,两个不共线的向量是线性无关的。三个不共面的向量是线性无关的。
- 线性相关:
- “存在冗余”: 向量组中至少有一个向量可以被其他向量的线性组合所表示。
- “未提供新方向”: 至少有一个向量位于由其他向量张成的空间中(如平面或直线)。
- 几何上: 在三维空间中,两个共线的向量是线性相关的。三个共面的向量是线性相关的。
数值示例:地理位置 (Example 2.13)
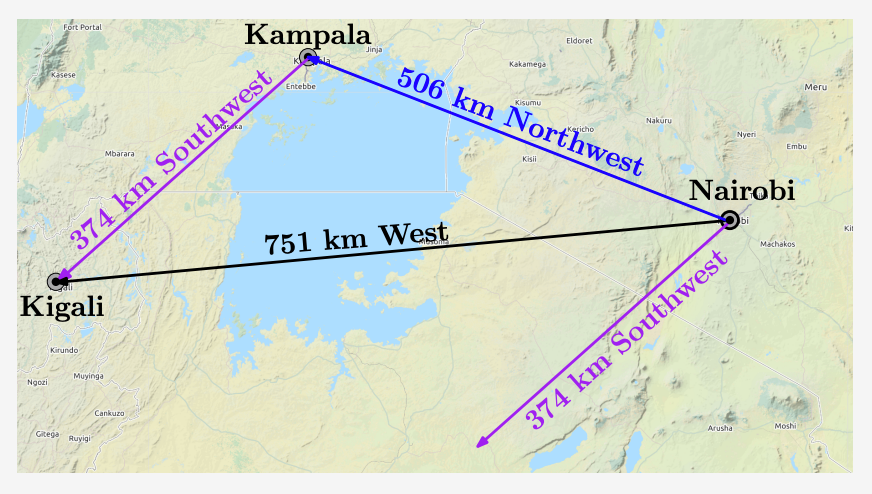
想象一下如何描述从内罗毕(Nairobi, Kenya)到基加利(Kigali, Rwanda)的路线。一个人可能会这样说:
- 向量 \(\boldsymbol{v}_1\): “从内罗毕向西北方向走 506 公里,到达坎帕拉(Kampala, Uganda)”。
- 向量 \(\boldsymbol{v}_2\): “然后从坎帕拉向西南方向走 374 公里,到达基加利”。
这两个向量是线性无关的,因为你无法只通过“西北”方向的移动来达到一个有“西南”分量的位置。它们提供了两个独立的方向。
现在,加入第三个向量: 3. 向量 \(\boldsymbol{v}_3\): “(从内罗毕)向西走 751 公里”。 事实证明,\(\boldsymbol{v}_3\) 恰好是 \(\boldsymbol{v}_1\) 和 \(\boldsymbol{v}_2\) 的向量和(即 \(\boldsymbol{v}_3 = 1 \cdot \boldsymbol{v}_1 + 1 \cdot \boldsymbol{v}_2\))。因此,向量组 \(\{\boldsymbol{v}_1, \boldsymbol{v}_2, \boldsymbol{v}_3\}\) 是线性相关的。\(\boldsymbol{v}_3\) 是一个冗余信息,因为它可以用前两个向量表示出来。
3. 判断线性无关性的方法#
性质判断
- 任何包含零向量的向量组一定是线性相关的。(因为可以让零向量的系数不为零,其他为零)
- 任何包含两个相同向量的向量组一定是线性相关的。
- 如果一个向量是另一个向量的倍数,那么这两个向量线性相关。
高斯消元法 (系统性方法)
这是判断任意向量组线性无关性的最通用、最强大的方法。
- 构造矩阵: 将向量组 \(\{\boldsymbol{x}_1, \dots, \boldsymbol{x}_k\}\) 作为列向量,构建一个矩阵 \(\boldsymbol{A} = [\boldsymbol{x}_1, \boldsymbol{x}_2, \dots, \boldsymbol{x}_k]\)。
- 求解齐次方程: 判断线性无关性等价于判断齐次方程 \(\boldsymbol{A}\boldsymbol{\lambda} = \boldsymbol{0}\) 是否只有零解 \(\boldsymbol{\lambda} = \boldsymbol{0}\)。
- 高斯消元: 对矩阵 \(\boldsymbol{A}\) 进行高斯消元,将其化为行阶梯形矩阵 (REF)。
- 数主元个数:
- 如果REF中每一列都有主元 (pivot),这意味着没有自由变量,方程 \(\boldsymbol{A}\boldsymbol{\lambda} = \boldsymbol{0}\) 只有唯一的零解。因此,向量组是线性无关的。
- 如果REF中存在没有主元的列,这意味着存在自由变量,方程 \(\boldsymbol{A}\boldsymbol{\lambda} = \boldsymbol{0}\) 有无穷多非零解。因此,向量组是线性相关的。
数值示例 (Example 2.14)
判断向量 \(\boldsymbol{x}_1 = \begin{bmatrix} 1 \\ 2 \\ -3 \\ 4 \end{bmatrix}\), \(\boldsymbol{x}_2 = \begin{bmatrix} 1 \\ 1 \\ 0 \\ 2 \end{bmatrix}\), \(\boldsymbol{x}_3 = \begin{bmatrix} -1 \\ -2 \\ 1 \\ 1 \end{bmatrix}\) 是否线性相关。
构造矩阵 \(\boldsymbol{A}\):
$$ \boldsymbol{A} = \begin{bmatrix} 1 & 1 & -1 \\ 2 & 1 & -2 \\ -3 & 0 & 1 \\ 4 & 2 & 1 \end{bmatrix} $$进行高斯消元,得到REF(或RREF):
$$ \begin{bmatrix} 1 & 1 & -1 \\ 2 & 1 & -2 \\ -3 & 0 & 1 \\ 4 & 2 & 1 \end{bmatrix} \xrightarrow{\text{消元}} \begin{bmatrix} 1 & 1 & -1 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & 0 \end{bmatrix} $$观察主元:矩阵有3列,消元后的REF有3个主元(每列都有一个)。
结论:由于每一列都有主元,方程 \(\boldsymbol{A}\boldsymbol{\lambda} = \boldsymbol{0}\) 只有零解。因此,这三个向量是线性无关的。
理解要点
线性无关是构建向量空间“骨架”的砖块。一组线性无关的向量张开了一个“不塌陷”的空间,其中每个向量都提供了不可替代的贡献。通过高斯消元法寻找主元,是我们洞察这种贡献是否独立的最有效工具。
本节知识点总结#
- 线性组合: 向量的基本表达方式,即向量的加权和。
- 线性无关: 组合为零向量的唯一方式是所有权重都为零。直观上表示“无冗余”。
- 线性相关: 存在非零的权重组合能得到零向量。直观上表示“有冗余”。
- 判断核心: 线性无关性的判断问题,本质上是求解一个齐次线性方程组是否有非零解的问题。
- 实用工具: 高斯消元法是判断线性无关性的标准算法,通过检查REF的主元列来得出结论。