
至此,我们已经研究了向量空间这一“静态”的舞台。现在,我们要研究舞台之间的“幕布切换”——即向量空间之间的变换。我们特别关心那些能保持向量空间原有结构(如网格线、原点位置)的“良好”变换,这些变换就是线性映射。
1. 线性映射的定义#
准确的数学定义 (Definition 2.15)
考虑两个实向量空间 \(V \) 和 \(W \)。一个映射 (或函数) \(\Phi: V \to W \) 如果满足以下两个条件,则被称为线性映射 (Linear Mapping) (或线性变换/向量空间同态):
- 保持加法结构: \(\Phi(\boldsymbol{x} + \boldsymbol{y}) = \Phi(\boldsymbol{x}) + \Phi(\boldsymbol{y}), \quad \forall \boldsymbol{x}, \boldsymbol{y} \in V\) (两个向量先相加再变换,等同于先各自变换再相加)
- 保持数乘结构: \(\Phi(\lambda\boldsymbol{x}) = \lambda\Phi(\boldsymbol{x}), \quad \forall \lambda \in \mathbb{R}, \forall \boldsymbol{x} \in V\) (一个向量先拉伸再变换,等同于先变换再拉伸)
这两个条件可以合并为一个:
$$ \Phi(\lambda\boldsymbol{x} + \psi\boldsymbol{y}) = \lambda\Phi(\boldsymbol{x}) + \psi\Phi(\boldsymbol{y}), \quad \forall \lambda, \psi \in \mathbb{R}, \forall \boldsymbol{x}, \boldsymbol{y} \in V $$直观解释
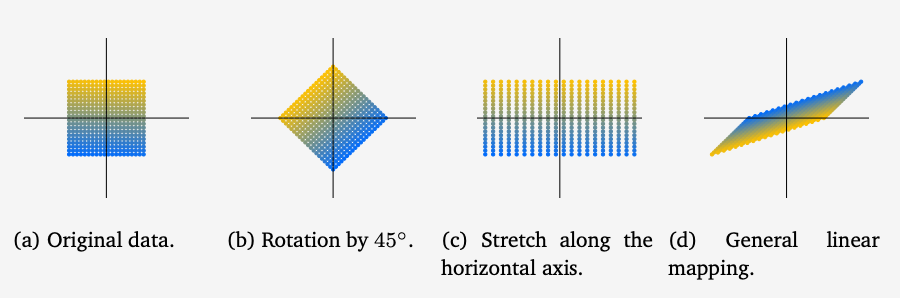
一个线性映射在几何上保持了网格线的平行和等距特性,并且原点位置不变 (\(\Phi(\boldsymbol{0}_V) = \boldsymbol{0}_W\))。常见的线性映射包括:
- 旋转 (Rotation)
- 缩放 (Scaling)
- 反射 (Reflection)
- 剪切 (Shear)
2. 线性映射的矩阵表示#
线性映射与矩阵之间存在着一种深刻而美妙的等价关系。
核心思想:任何一个从 \(n \) 维向量空间 \(V \) 到 \(m \) 维向量空间 \(W \) 的线性映射 \(\Phi\),都可以用一个 \(m \times n \) 的变换矩阵 (transformation matrix) \(\boldsymbol{A}_{\Phi} \) 来唯一表示。
如何构建这个矩阵?
在输入空间 \(V \) 中选定一组基 \(\mathcal{B} = (\boldsymbol{b}_1, \dots, \boldsymbol{b}_n)\)(注意,这里是有序基)。
在输出空间 \(W \) 中选定一组基 \(\mathcal{C} = (\boldsymbol{c}_1, \dots, \boldsymbol{c}_m) \)。
考察 \(V \) 中的每个基向量 \(\boldsymbol{b}_j \) 在经过映射 \(\Phi \) 后的像 \(\Phi(\boldsymbol{b}_j) \)。这个像位于 \(W \) 中,因此可以被唯一地表示为 \(\mathcal{C} \) 中基向量的线性组合。
将像 \(\Phi(\boldsymbol{b}_j) \) 在基 \(\mathcal{C}\)下的坐标向量,作为变换矩阵 \(\boldsymbol{A}{\Phi}\) 的第 \(j \) 列。
$$ \boldsymbol{A}_{\Phi} = \begin{bmatrix} | & | & & | \\ \Phi(\boldsymbol{b}_1)_{\mathcal{C}} & \Phi(\boldsymbol{b}_2)_{\mathcal{C}} & \cdots & \Phi(\boldsymbol{b}_n)_{\mathcal{C}} \\ | & | & & | \end{bmatrix} $$一旦得到这个矩阵,对于 \(V \) 中任意向量 \(\boldsymbol{x}\)(其在基 \(\mathcal{B} \) 下的坐标为 \(\hat{\boldsymbol{x}}\)),其像 \(\Phi(\boldsymbol{x}) \) 在基 \(\mathcal{C} \) 下的坐标 \(\hat{\boldsymbol{y}} \) 就可以通过简单的矩阵乘法得到:
$$ \hat{\boldsymbol{y}} = \boldsymbol{A}_{\Phi}\hat{\boldsymbol{x}} $$
要点
矩阵不仅仅是数字的表格,它编码了一个线性变换的全部信息。矩阵的每一列,都描绘了对应基向量的“命运”——它将被变换到何方。知道了所有基向量的去向,我们就知道了整个空间的去向。
3. 基变换 (Change of Basis)#
同一个线性映射,如果选择不同的基(坐标系),其对应的变换矩阵也会不同。基变换公式揭示了这些不同矩阵之间的关系。
定理与公式 (Theorem 2.20)
设 \(\Phi: V \to W \) 是一个线性映射。
- \(A_{\Phi} \) 是 \(\Phi \) 在 \(V \) 的旧基 \(\mathcal{B} \) 和 \(W \) 的旧基 \(\mathcal{C}\)下的变换矩阵。
- \(\tilde{A}_{\Phi} \) 是 \(\Phi \) 在 \(V \) 的新基 \(\tilde{\mathcal{B}} \) 和 \(W \) 的新基 \(\tilde{\mathcal{C}}\)下的变换矩阵。
则它们的关系为:
$$ \tilde{\boldsymbol{A}}_{\Phi} = \boldsymbol{T}^{-1}\boldsymbol{A}_{\Phi}\boldsymbol{S} $$- 变量说明:
- \(\boldsymbol{S} \) 是从 \(V \) 中新基到旧基的基变换矩阵。它的第 \(j \) 列是新基向量 \(\tilde{\boldsymbol{b}}_j \) 在旧基 \(\mathcal{B}\)下的坐标。
- \(\boldsymbol{T} \) 是从 \(W \) 中新基到旧基的基变换矩阵。
- \(\boldsymbol{T}^{-1} \) 是从 \(W \) 中旧基到新基的基变换矩阵。
直观解释 (复合映射视角): 要用新基坐标计算变换,可以分三步走:
- $\boldsymbol{S}\hat{\boldsymbol{x}}$: 先用矩阵 \(\boldsymbol{S} \) 将向量在新基 \(\tilde{\mathcal{B}} \) 下的坐标 \(\hat{\boldsymbol{x}} \) 换算成在旧基 \(\mathcal{B} \) 下的坐标。
- $\boldsymbol{A}_{\Phi}(\boldsymbol{S}\hat{\boldsymbol{x}})$: 然后用旧的变换矩阵 \(\boldsymbol{A}_{\Phi} \) 进行线性变换,得到在旧基 \(\mathcal{C}\)下的像坐标。
- $\boldsymbol{T}^{-1}(\boldsymbol{A}_{\Phi}\boldsymbol{S}\hat{\boldsymbol{x}})$: 最后用矩阵 \(\boldsymbol{T}^{-1} \) 将像坐标从旧基 \(\mathcal{C} \) 换算到新基 \(\tilde{\mathcal{C}}\)下。
相似矩阵 (Similar Matrices)
一个重要的特例是自同态 (endomorphism),即映射在同一个空间内部进行 \(\Phi: V \to V\),且输入和输出都使用同一组基。此时基变换公式简化为:
$$ \tilde{A}_{\Phi} = \boldsymbol{S}^{-1}\boldsymbol{A}_{\Phi}\boldsymbol{S} $$称矩阵 \(\boldsymbol{A}_{\Phi} \) 和 \(\tilde{A}_{\Phi}\) 是相似的。相似矩阵描述的是同一个线性变换在不同坐标系下的不同表现形式。寻找一个“最好”的基,使得变换矩阵变得尽可能简单(如对角矩阵),是特征值分解的核心思想。
4. 核 (Kernel) 与 像 (Image)#
线性映射的两个基本子空间:
定义 (Definition 2.23)
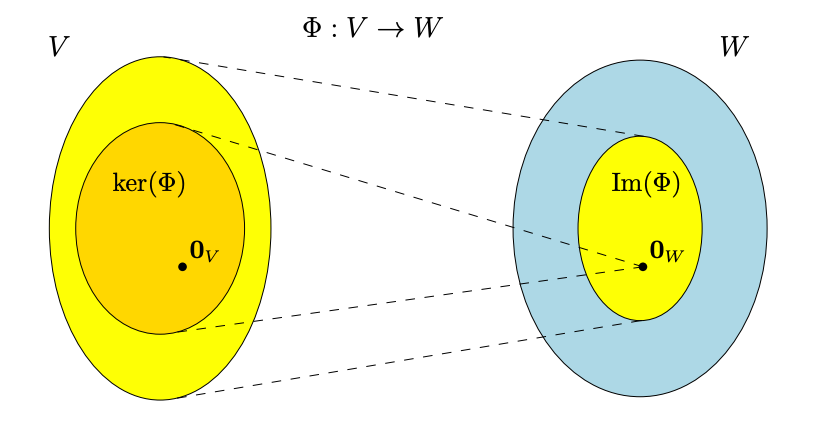
对于线性映射 \(\Phi: V \to W\):
核 (Kernel) 或 零空间 (Null Space): 输入空间 \(V \) 中,所有被映射到输出空间 \(W \) 的零向量 \(\boldsymbol{0}_W \) 的向量集合。
$$ \text{ker}(\Phi) := \{\boldsymbol{v} \in V \mid \Phi(\boldsymbol{v}) = \boldsymbol{0}_W\} $$对于矩阵变换 \(\boldsymbol{A}\boldsymbol{x} \), 核就是齐次方程 \(\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0}\) 的解空间。
像 (Image) 或 值域 (Range): 输出空间 \(W \) 中,所有可以被 \(V \) 中某个向量映射“到达”的向量集合。
$$ \text{Im}(\Phi) := \{\Phi(\boldsymbol{v}) \mid \boldsymbol{v} \in V\} $$对于矩阵变换 \(\boldsymbol{A}\boldsymbol{x} \), 像就是矩阵 \(\boldsymbol{A} \) 的列空间 (column space),即由其列向量张成的子空间。
秩-零度定理 (Rank-Nullity Theorem)
这是线性代数的基本定理之一,它深刻地揭示了输入空间、核与像之间的维度关系。
$$ \text{dim}(\text{ker}(\Phi)) + \text{dim}(\text{Im}(\Phi)) = \text{dim}(V) $$- 零度 (Nullity): \(\text{nullity}(\Phi) = \text{dim}(\text{ker}(\Phi))\)
- 秩 (Rank): \(\text{rank}(\Phi) = \text{dim}(\text{Im}(\Phi)) = \text{rk}(\boldsymbol{A}_{\Phi})\)
定理释义:输入空间的维度,等于“被压缩掉的维度”(核的维度)加上“变换后剩下的维度”(像的维度)。这是一个深刻的维度守恒定律。
本节知识点总结#
- 线性映射: 保持向量加法和数乘运算的结构性变换。
- 矩阵表示: 任何线性映射都唯一对应一个变换矩阵,该矩阵的列是基向量的像。
- 基变换: 同一个线性变换在不同基下的矩阵表示通过 \(\tilde{A} = T^{-1}AS \) 关联,相似矩阵是其重要特例。
- 核与像: 两个核心子空间。核是被映射为零的输入集合,像是所有可能的输出集合。
- 秩-零度定理: \(\text{dim}(\text{核}) + \text{dim}(\text{像}) = \text{dim}(\text{输入空间})\),揭示了维度在变换中的守恒关系。